知能行動(オートポイエーシス論)
「本能行動と欲求行動(オートポイエーシス論)」のページにおいて、環境との相互浸透による運動成分連鎖の縮減と新生を、それぞれ本能行動と欲求行動として記述しました。この記述の仕方だと、両者の間にローレンツの考えるほどの相違はないことになります。そうであるならば、欲求行動のうち高等哺乳類にのみ見られる洞察的知能行動も同様に記述できるはずです。神経系を持つ動物であれば持つであろう本能行動と、類人猿の道具使用などの知能行動がほとんど変わらないというのは、大きな違和感が残るのも確かです。ひとまずこのページでは、類人猿の道具使用(知能行動)が上述の欲求行動と同様に記述できるか見てみることにします。
1.類人猿の道具使用
コンラート・ローレンツがケーラーの残した動画をもとに、類人猿が台を使ってバナナを取る行動を詳細に記述しています。彼の記述は次のようなものです(「心理学と系統発生学」Ⅵ章、『動物行動学Ⅱ』所収)。
部屋の天井にバナナが紐でつるされており、それはオランウータンが床からとどかないほどの高さであった。部屋のすみにはオランウータンが梯子として用いるのに十分なだけの高さの箱がひとつ置かれている。洞察的な行動に関するさまざまな試験をかつてうまくやりとげたことがあるがこの新しい問題は知らないオランウータンは、まずバナナの方をちらっと見て、それから箱の方に眼をやり、しばらくとまどって両方を見くらべる。このとき彼は、ちょうど深く考えこんでいる人間のように頭–や体の他の部分–をかきむしる。それからかんしゃくを起こして手足をばたばたさせ、大股に歩いて侮蔑したようにバナナや箱に背をむける。けれどもそれでも彼は落ちつかず、再び問題にたち返り、餌と箱の間をくり返し見くらべる。今まで不きげんだった彼の表情は急に≪明るくなり≫、眼は今やバナナからバナナの下の床の空間へ、そして箱へ、それから再び床の空間へ、またそこからバナナへと移る、としか私にはいえない。次の瞬間に彼は歓喜の叫びをあげて得意のとんぼ返りをしながら箱の方へ行き、今度はバナナが手にはいることをすっかり確信してただちに箱をバナナの下に引いてくる。
以上の洞察による行動を行うためには、既に成立している複数の行動連環を結び付けて、一つの新たな行動連環を生起しなければなりません。学習と同様に、記憶領域の賦活によって、一つの行動連環として生起するとみなすことは可能です。しかし、学習では元になる行動連環はすでに継起しているのに比べ、上記の道具使用は、今その瞬間の知覚器の興奮では生起しない行動連環を、試行錯誤などではなく起動しなければなりません。
2.未来像
上で述べられたような洞察的行動を、神経系のみで説明するのは非常に困難です。したがってここでも欲求行動のときと同様に、意識や認識の浸透により、身体動作の連環が生起していると考えることにします。また道具使用を行っているときの類人猿の主観は人間とほぼ同様であると仮定します。
人間の意識への現れを参照にすると、上のオランウータンでもバナナが取れることを確信した瞬間(「ははあ,そうか体験」)に、連続して現れる表象が一つの統合された表象として現れ、あるべき未来の像として意識に現れていると考えられます。この統合されて現在の知覚像の基底となる知覚像を「未来像」と名付けておきます。この未来像に導かれるように、それまで成立していなかった身体動作が連環を成していきます。
3.自己言及による未来像の説明
3.1 自己言及による未来像の記述
このサイトでは本能行動や欲求行動を身体の状態の連環で考えていて、縮減を本能行動、新生を欲求行動としています。
関連ページ:本能行動と欲求行動(オートポイエーシス論)
洞察的行動でも身体の状態の連環が新生されるわけですが、環境の攪乱のところに、新しく成立した認識状態(未来像)を環境とする攪乱が加わります。オートポイエーシス論として記述するには、基体・構成素、構造、産出プロセスが何かを見定める必要があります。
まず未来像は構造として考えることができそうです。そうするとその基体・構成素と産出プロセスが何かを決める必要があります。すでに意識、認識(ゲシュタルト知覚)を身体の自己言及システムの構造として記述しているので、これら構造である意識、認識の自己言及として未来像を記述してみます。自己言及の定義は下の通りです。
- 自己言及:オートポイエーシス・システムのそれまでの作動が、新たな構成素の産出に際して攪乱を与え、その構成素もしくは構造の状態がシステムそのものの作動を反映すること。
関連ページ:システムの自己言及
自己言及として考える場合は、構造である意識、認識が構成素である表象(山下和也の考え方)の新たな産出を攪乱し、新たな構成素または構造が意識システムの全体を反映すると考えることになります。次の時点の構造が構成素や産出プロセスを介してそれまでの構造を反映するという言い方もできます。この「それまでの構造(意識、認識)」が「次の時点の構造」を反映するということが、類人猿の心的事象としては「未来像」という形で現れてきます。
3.2 未来像と現在の認識の関係
人が台をバナナの下にもってきてバナナを取るとき、確実に認識されているのは目の前の視覚像です。一度成立した未来像は基底として現在の視覚像を揺さぶり続け、一連の行動の連環を導いていきます。
「揺さぶり続ける」のような曖昧な言葉遣いをするなと怒られそうですが、自分が道具を使用するときの認識は、そのような言葉遣いでしか言い表せません。「未来像」という言葉を使いましたが、確かに現在の知覚像とは違う認識が成立して行動を誘導しているという確信はあるのに、明確には知覚像として現れてきません。未来像の主体への現れは確かにあるという感じであり、その役割は視覚像(本来は視覚に限る必要はない)を固定せずに新たな行動連環へと開いた状態にすることです。
3.3 未来像と身体・神経系との関係
知能行動は類人猿で初めて起こるわけなので、身体と神経系の発達により身体動作および表象の連環が多様化して、この多様化により自己言及が可能になっているはずです。この自己言及を引き起こす身体・神経系の多様性の度合いに明確な境界があるわけではなく、類人猿とその他の猿に漠然とした境界線があると考えられます。
また、この自己言及による攪乱と新生はその瞬間に成立してすぐに消えるような不安定なものでしょうし、一方で身体構造の固定性によりある程度の限定も受けているでしょう。一度成立した未来像とそれによる知能行動も、常に類似の状況になれば生成されるというわけではないでしょう。
3.4 知能行動(道具使用)の図式化
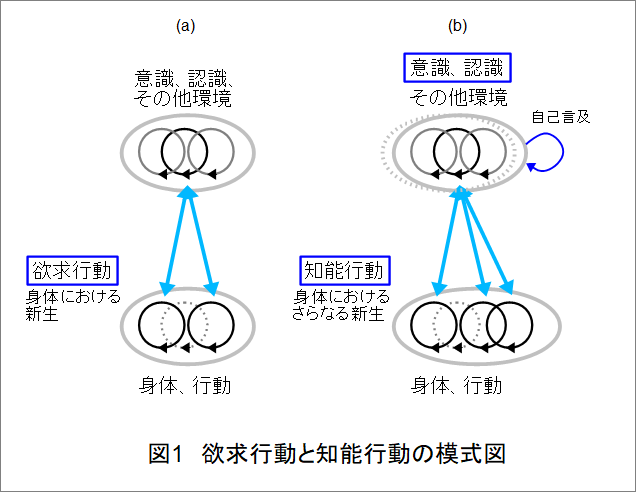
自己言及の図式化はまだ行われていないため(図式化が行われたのは自己言及システム)、知能行動の図式はこれまでとそれほど変わりありません。欲求行動の図(図1(a))では環境との相互浸透による経路の新生であり、システムの構造との特段の対応関係があるわけではありません。それに対して知能行動では、環境のうち意識(自己言及システムの構造)と認識が自己言及でそれまでの自己の構造を反映するという状態(未来像)が加わり、それにより身体動作連環のさらなる新生が生じます(図1(b))。
<< 本能行動と欲求行動(オートポイエーシス論) 世界像(オートポイエーシス論) >>